CanSat is an international project, which allows students to test their strength in various fields, such as physics, engineering and networking. It is based on a primary mission, which is compulsory, and a secondary mission, which the competitors have to come up with.
— Esero
Find out more about our project by taking a look at the model of our CanSat or exploring our recent Critical Design Review report.
As the regulations require, our CanSat will monitor its altitude while falling using a BMP 280 temperature and pressure sensor; connected to the Adafruit Feather M0, the sensor will activate and using the pressure – temperature correlation formula:
At 1Hz, will transmit the readings once per second through a 433Mhz LoRa RFM96 radio module with an omnidirectional antenna. The data will then be graphed out to provide us with the descent rate. Knowing the crosswind value and the rate of change of altitude, we will be able to better estimate the position of the can as it falls on the ground.
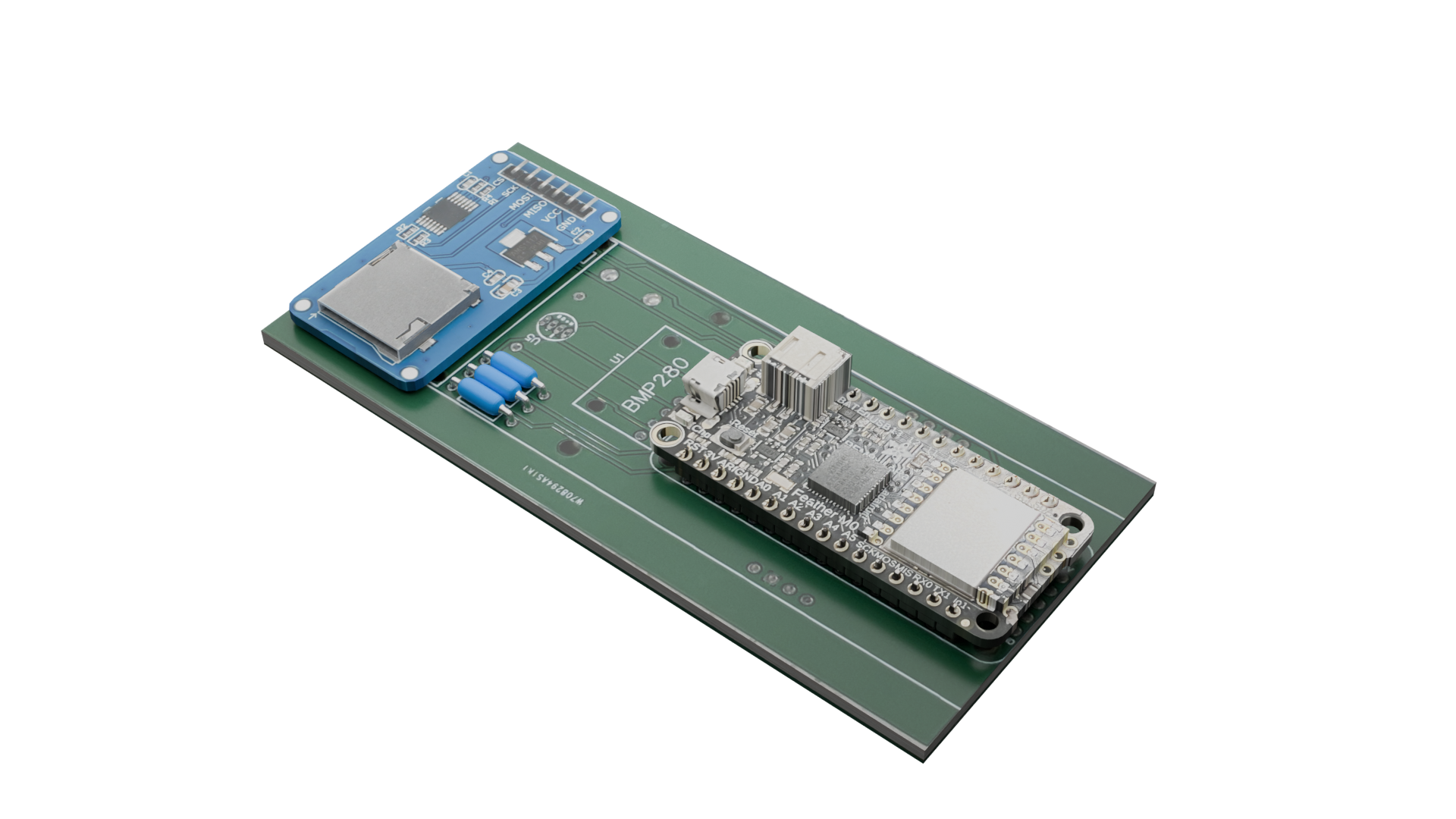
Our CanSat establishes a two-way communication link with the ground station, using Lora RFM96 modules on both ends. It receives information from the ground station when not transmitting primary mission data, saving it on a micro-SD card. Commands are then relayed to a rover equipped with a directional receiver antenna, allowing task execution. This approach overcomes the limitation of direct control from Earth due to a significant distance of over 3 km. The secondary mission is a technological demonstration, resembling an ExoMars mission, optimizing communication through a relay satellite. This allows the rover to carry a more compact, lighter antenna, enhancing speed, reducing weight, and enabling the incorporation of additional sensors for more comprehensive data collection. Mission success hinges on the CanSat effectively transmitting and executing commands through the rover.
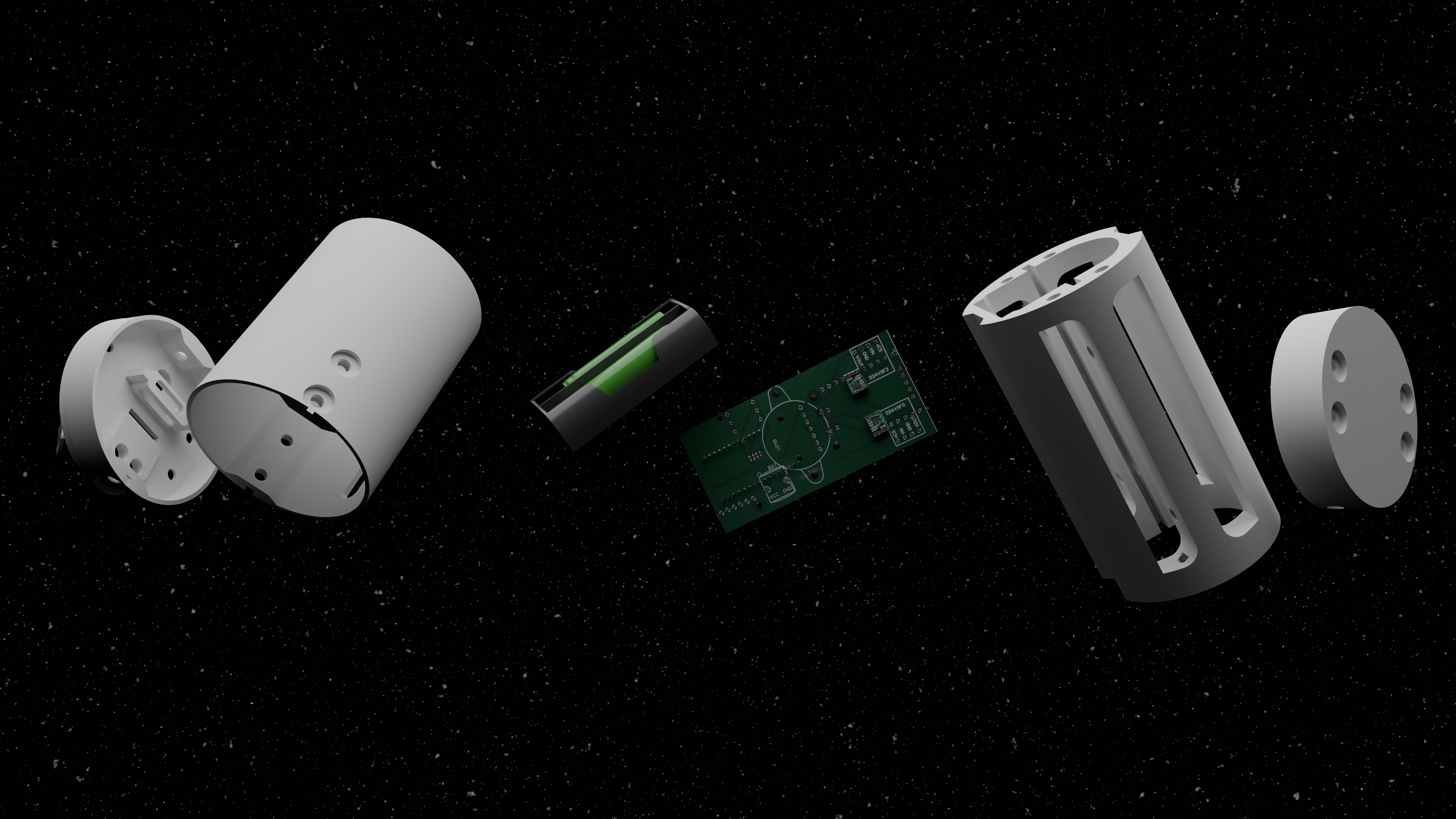
Our CanSat body was designed in Autodesk Fusion 360 for a precise 3D model. Using a Prusa 3D printer, we'll construct structural layers with Polylactic Acid or ColorFabb XT filament, reinforced with 20% carbon fiber for enhanced precision and rigidity. The CanSat comprises four main architectural components.
Our CanSat body was designed in Autodesk Fusion 360 for a precise 3D model. Using a Prusa 3D printer, we'll construct structural layers with Polylactic Acid or ColorFabb XT filament, reinforced with 20% carbon fiber for enhanced precision and rigidity. The CanSat comprises four main architectural components.
Protects internal components during flight and absorbs impact during landing. Cylindrical, 112mm in height, 66mm external diameter, with 15% infill for added strength.
Houses all avionics and components, securely mounting the motherboard with screws. Three AA batteries are distributed between the casing base and the main chamber. Cylinder-shaped, with an external diameter of 60.5mm, internal diameter of 49mm, and optimized for mass with holes. Features a 30% infill for component safety.

Jan is an exceptional mathematician and physicist, evidenced by his A-Level choices in physics, mathematics, and further mathematics. Passionate about mechanical engineering, particularly F1 engines, Jan serves as the system engineer, handling calculations, devising mission plans, managing the CanSats website, and overseeing the entire project.

Alan is a talented mathematician and physicist, reflected in his A-Level choices of physics, mathematics, and further mathematics. He holds a strong interest in electrical engineering, with previous experience from external summer courses. Currently, Alan is tasked with preliminary circuit design for both the ground station and website.

Aleksander harbors a keen interest in programming and aims to carve a career in this domain. While yet to commence his A-Levels, his IGCSE pathway centers on engineering with computer science as an additional subject. Backed by prior experience in C++ and Arduino, he shoulders the responsibility of managing Arduino's communication with the base and overseeing a temperature and pressure measuring program.

Konstanty, passionate about theoretical physics, astrophysics, and finance, has chosen A-Levels in mathematics, further mathematics, and physics. With previous experience from external summer school programs in finance and engineering, he brings valuable expertise to the team. Konstanty's responsibilities include setting the financial plan and supporting Gabriela in securing sponsorships and conducting outreach activities.

Jakub, passionate about mechanical engineering, demonstrates exceptional writing skills. While he hasn't started his A-Levels, his IGCSE pathway focuses on triple science. With prior experience in electrical engineering, mechanical engineering, and 3D design, Jakub aspires to pursue a career in aeronautics or related engineering fields. Presently, he's dedicated to the preliminary design of our CanSat.

Gabriela brings previous experience from the CanSat competition and has chosen A-Levels in physics, mathematics, and biology. With a passion for astrophysics and aerospace engineering, she will oversee press management, report structuring, and outreach efforts including sponsorships and social media activity.